









由于其社会经济和生态重要性,对淹没的枯木和植被的监测正受到越来越多的关注。枯木是重要的水下栖息地,但也对桥梁、水力发电厂和河边建筑物构成威胁。反过来,水下植被是总体气候变化,特别是全球变暖的代表。在这种情况下,无人机携带的地形测深激光雷达成了一种很有前途的工具,可以以高空间分辨率准确捕获和建模这些小尺度物体。
天然河流周围的冲积林构成了重要的生态栖息地。季节性洪水波将枯木带入活跃的河道,在那里它向下游漂流,直到天然或人工障碍物(河流弯道、桥墩、水电站等)停止移动。这种搁浅的浮木在水生生态系统中发挥着重要作用,例如作为幼鱼阶段的避难所,但原木堵塞也会破坏基础设施和居民区。除了枯木之外,对沿海植被(即淹没植被直至阳光可以穿透以支持光合作用的深度)的监测越来越受到关注,因为这种植被可以作为气候变化的代表。淹没的大型植物对全球变暖引起的水温升高和其他参数的反应非常敏感。因此,从生态和社会经济的角度来看,监测河流和湖泊出口以及沿岸植被中浮木的体积和分布是一个重要的课题。
拓荒者
地形测深激光雷达是一种既定的工具,用于绘制沿海和内陆水域的沿岸带。测深激光雷达使用电磁光谱绿波段中的短激光脉冲来测量地下水位上方和下方的物体。与使用红外激光扫描的地形传感器相比,测深传感器采用较大的光束发散角,这导致获取的数据直径约为 50 厘米。这会妨碍对水下原木和树枝的检测,尤其是对于直径小于 30 厘米的物体。无人机载地形测深激光雷达传感器的出现从根本上改变了这种情况,因为这些系统提供了大约 10 厘米的小激光光斑直径和 >200 点/平方米的高激光脉冲密度。
在本文中,我们展示了基于测量级无人机载地形测深激光扫描仪获取的 3D 点云检测和建模水下浮木和植被的早期结果。我们证明了树干、树枝和沿海植被在点云中是可识别的。可满足点密度和测量精度相关要求,例如浮木原木的长度和直径以及大型植物的高度。让我们能够以高空间分辨率对淹没的生物质进行定量分析。
传感器
RIEGL VQ-840-G 是一个集成的地形测深激光扫描系统,包括一个工厂校准的 IMU/GNSS系统和一个摄像头,从而实现了一个完整的机载激光扫描系统(见图 1)。轻巧紧凑的 VQ-840-G 激光雷达可以安装在包括无人机在内的各种平台上。激光扫描仪包括一个倍频红外激光器,在 532 mrad 的波长和 50-200 kHz 的脉冲重复率下发射脉冲持续时间约为 1.5ns 的脉冲。在接收端,输入的光信号被转换成数字化的电信号。激光束发散度可以在 1-6 mrad 之间选择,可以在不同飞行高度保持恒定的点密度,从而平衡人眼安全操作和空间分辨率。接收器的 iFOV(瞬时视场)可以在 3 到 18 mrad 之间进行选择。这允许空间分辨率和最大深度穿透的平衡。

图 1 搭载了 RIEGL VQ-840-G 水陆联测激光扫描系统的八旋翼无人机飞行在皮拉赫河研究区上
研究区域和数据
研究区位于下奥地利多瑙河支流前高山皮拉赫河的尾水处,砾石河床河道蜿蜒曲折,随着洪水高峰的发生,地貌变化频繁。河流平均宽度 20 m 左右,年平均流量 7 立方米/s,最大深度约为 3 m,可使用地形测深激光雷达全面覆盖整个河底。冲积植被(树木、灌木、灌木)通常从岸边延伸到湿润的周边,导致木屑频繁进入河流。此外,较大的洪峰将浮木原木从上游运送到该区域,原木通常在此处停留较长时间,然后随着下一个洪峰进一步向下游漂流。
邻近洪泛平原的地下主要是过去开采的河砾石,留下了大约十几个地下水供应的池塘,最大深度为 5.6 m,水下植被斑块。复杂的水深测量以及水下浮木和沿海植被的存在使该地点成为无人机载地形测深激光雷达的理想研究区域。
最近,该地区已使用 RIEGL VQ-840-G 进行了两次勘测。2021 年 11 月,扫描仪安装在一架八旋翼无人机上,从地面以上 50-60 m 运行,光束发散角为 1-2 mrad,提供约 1 dm 的光斑直径,脉冲频率为 50 kHz 和 200 kHz。同时基于无人机的摄影测量飞行任务是为激光雷达点云着色的基础(见图 2)。2022 年 2 月,同样的仪器安装在直升机平台上。虽然无人机载采集的目标是最大空间分辨率以检测水下原木和树枝,但直升机集成的重点是最大化穿透深度。出于这个原因,5 mrad 的较大光束发散角与 9 mrad 的接收器 FoV 一起使用。

图 2:皮拉赫河研究区;3D 地形测深激光雷达点云与同时采集的航空 RGB 图像着色。
方法和结果
处理流程主要遵循标准测深激光雷达工作流程。在数据拼接和坐标转换之后,我们模拟了一个连续的水面模型,并对原始测量值进行了运行时间和折射校正。修正后的点作为推导 DTM(裸地 + 水下底部)的基础。此外,所有剩余水柱点的体积点密度使水下植被的自动分类成为可能。视觉分析揭示了两类淹没植被:(i) 单个宽大的树干和 (ii) 束较小的树枝和植被斑块。

图 3:RGB 着色的水下浮木茎的 3D 点云。
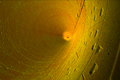
图 3 显示了由 RG B着色的大型单个茎的 3D 点云,图 4 显示了按分类着色的整个柳树的许多细枝。这两个例子都证明了 (i) 检测和 (ii) 从无人机携带的地形测深点云中自动分类水下植被的可行性。图 3a 中的茎长和宽分别为 7.54 m 和 33 cm。与干燥森林中的枯木相比,淹没的浮木通常更稀疏,并且没有下层有利于检测。另一方面,水下激光信号的前向散射导致点云模糊,由于随着水深的增加,淹没的浮木点云逐渐变宽,这使得密集的小结构(分支)的自动检测和植被斑块的精确估计变得复杂。图 5 显示了沉水植物植被的斑块。

图 4:按类别 ID(红色)着色的水下柳树枝束的 3D 点云。
结论与展望
无人机和激光雷达传感器技术的进步正在实现对水下地形的捕获以及对枯木和水下植被等复杂特征的详细检测。无人机载地形测深传感器,具有约 1 mrad 的激光束发散角,在大约 100 米的高度运行。50 m 提供亚分米激光足迹直径。再加上 200k Hz 的高脉冲重复率和 5-6 m/s 的慢速飞行速度,点密度超过 200 点/平方米,因此空间分辨率非常高。
基于 3D 点的自动分类可以量化沉水枯木(树干长和宽度)和沿海植被(植被高度和体积)的参数。还可以更好地了解绿色激光扫描与水和激光视线内多个小尺寸物体的相互作用,以改进已建立的全波形处理技术来处理这些复杂的目标情况。其他感兴趣的主题包括改进水下浮木、植被和水底的自动分类、单个枯木原木的分割、沿海植被的表征以及衍生指标的独立准确性评估。

图 5:由反射率着色的 3D 地形测深激光雷达点云(蓝色:-30dB,红色:-10dB)显示大型植物植被斑块
原文来自 gim-international(https://www.gim-international.com/content/article/underwater-deadwood-and-vegetation-from-uav-borne-topobathymetric-lidar);
翻译来自 LiDAR前沿(https://mp.weixin.qq.com/s/HcjWitVC9PLu4MVASZkgxA);
相关文章:A case study for detection and modelling of submerged deadwood from UAV-borne topo-bathymetric LiDAR point clouds (基于无人机载水陆联测 LiDAR 点云的水下枯木检测和建模案例研究,http://www.riegl.com/media-events/projects/unmanned-scanning/project/a-case-study-for-detection-and-modelling-of-submerged-deadwood-from-uav-borne-topo-bathymetric-lidar/)
下一篇:农业、林业试验田扫描
- 地址:北京市丰台区芳城园一区17号楼日月天地B座2207室
- 电话:010-58076040
- 邮编:100078